| Home | IONOTRONICS | Blog | Purchasing | Contact |
Videos on Networked Robots Platform
| Item | Topic | Media | Description |
|---|---|---|---|
1 |
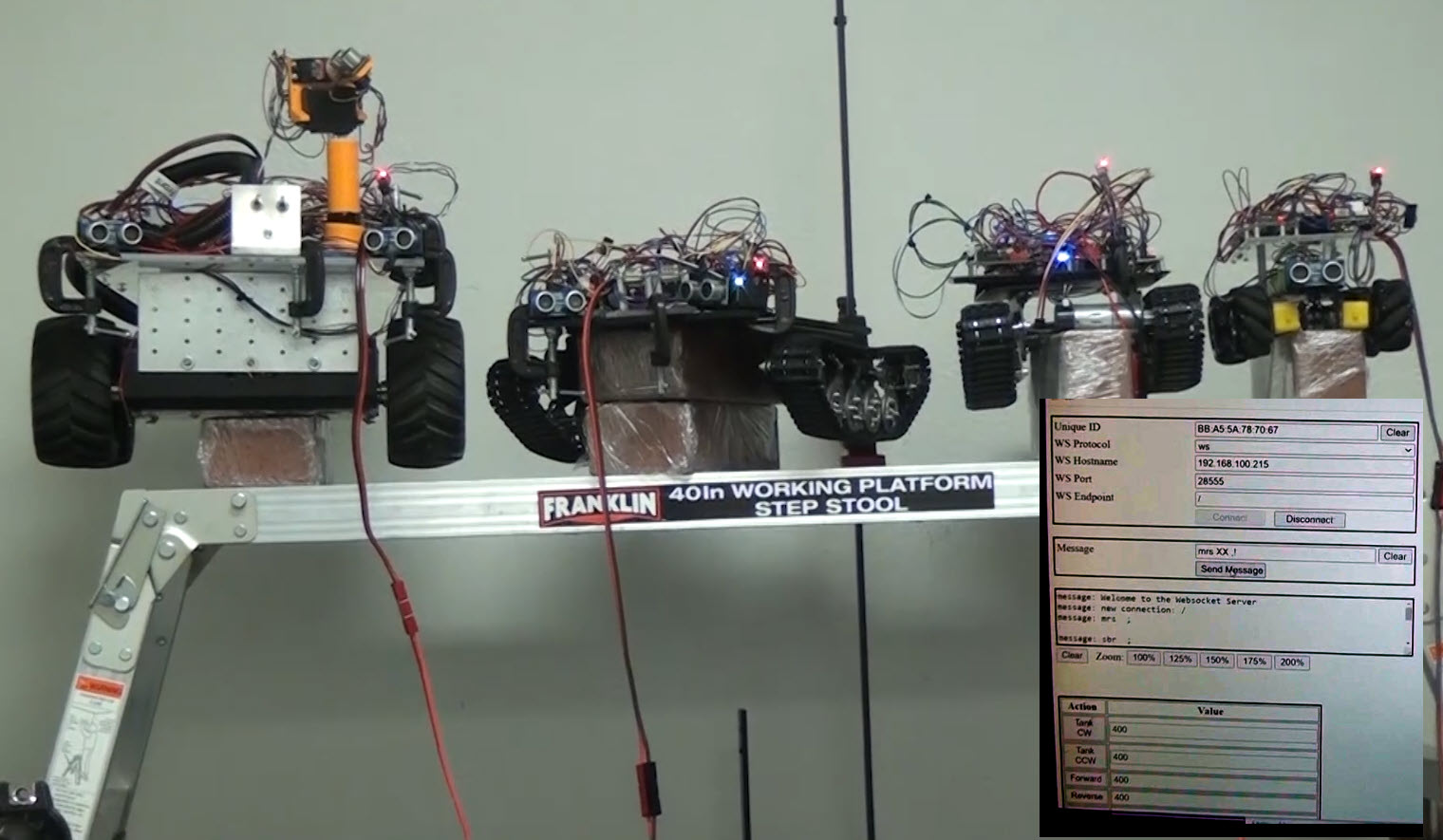
Multiple Rover Robots Controlled by HTML5 Clients (Chrome Browser)
|
This video shows multiple Rover Robots networked through the Networked Robots Platform and controlled by an HTML5 Websocket Client using a Chrome Browser. Individual Robots are accessed by the Browser and the Rover Motion is controlled as well as sending Morse Code Messages. Rovers can be driven from anywhere on the Internet with an HTML Browser using only a URL. |
|
2 |
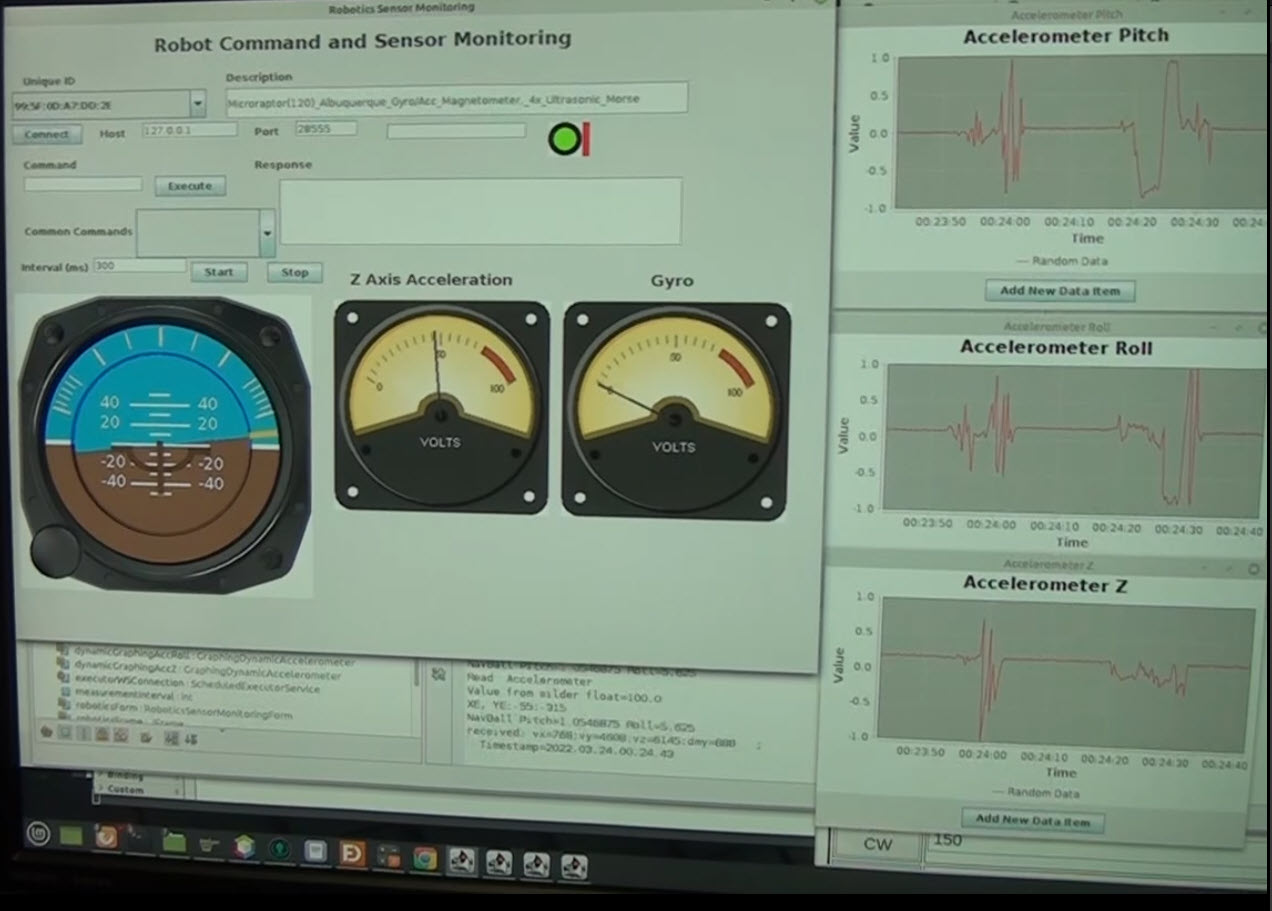
Networked Robots Measuring Sensors (Accelerometer) Microraptors®
|
Robots on the Networked Robots Platform can be accessed using a Java Application that can measure the Rover's Sensors. In this video, the X,Y, and Z Accelerometer Axis are measured at 250ms intervals and Strip Charts show the measurement. Also a Java Bean NavBall and Meter are used to show the measurements. A Java Application can access the sensors of multiple Rovers on the network. |
|
3 |
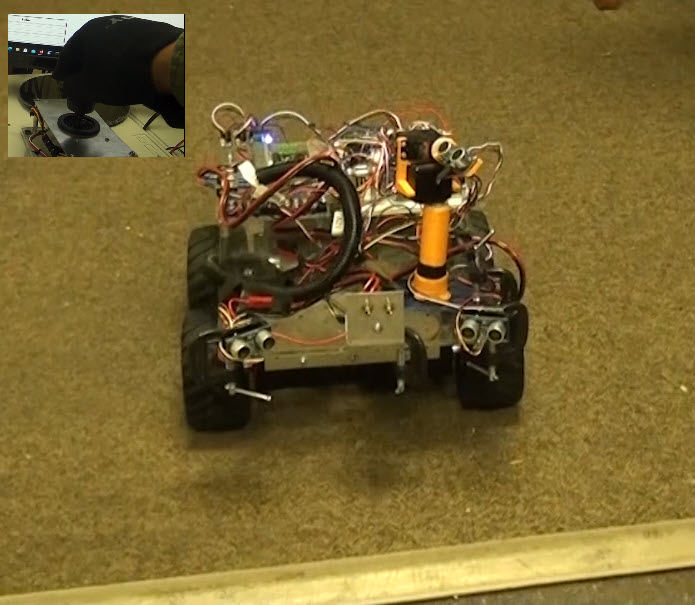
Java Application Controlling Rover with Joystick Through Networked Robots Platform
|
The Rover is on the Network as well as an SoC ( Microchip PIC32MX360F512) Board with 4x ADC I2C with each ADC connected to the Joystick X,Y and Z axis potentiometers. The Java App makes a connection to the Rover and to the SoC Board through the Networked Robots Platform. The Rover and SoC Board each have a Unique ID (48 bit). The Java App, through the Networked Robots Platform, reads the Joystick positions through the I2C 4 channel ADC with SoC as I2C Master. All through Wireless ( SoC Board also has WiFi Module).
|
|
4 |
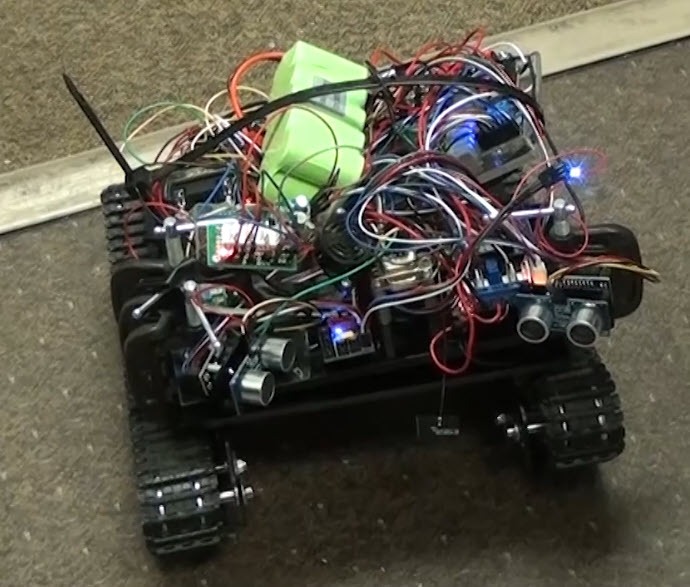
Networked Robots Stopped With Lost Link TS 100 Tank
|
A key aspect of the Networked Robots Platform is that if a Wireless Rover loses the link, for example it is out of range, the Rover will initiate a hard stop. The video demonstrates this capability with a Tank Rover on the network. Each Rover has a timer that causes an interrupt at a fixed interval. The Frontline Server sends heart beats ("xx") on an interval basis. During the interrupt, if it is determined that a heartbeat has not been received, the Rover is stopped. Once the link is re-established the Rover can move around under command. This is automatic. No need to restart the Rover. |
|
5 |
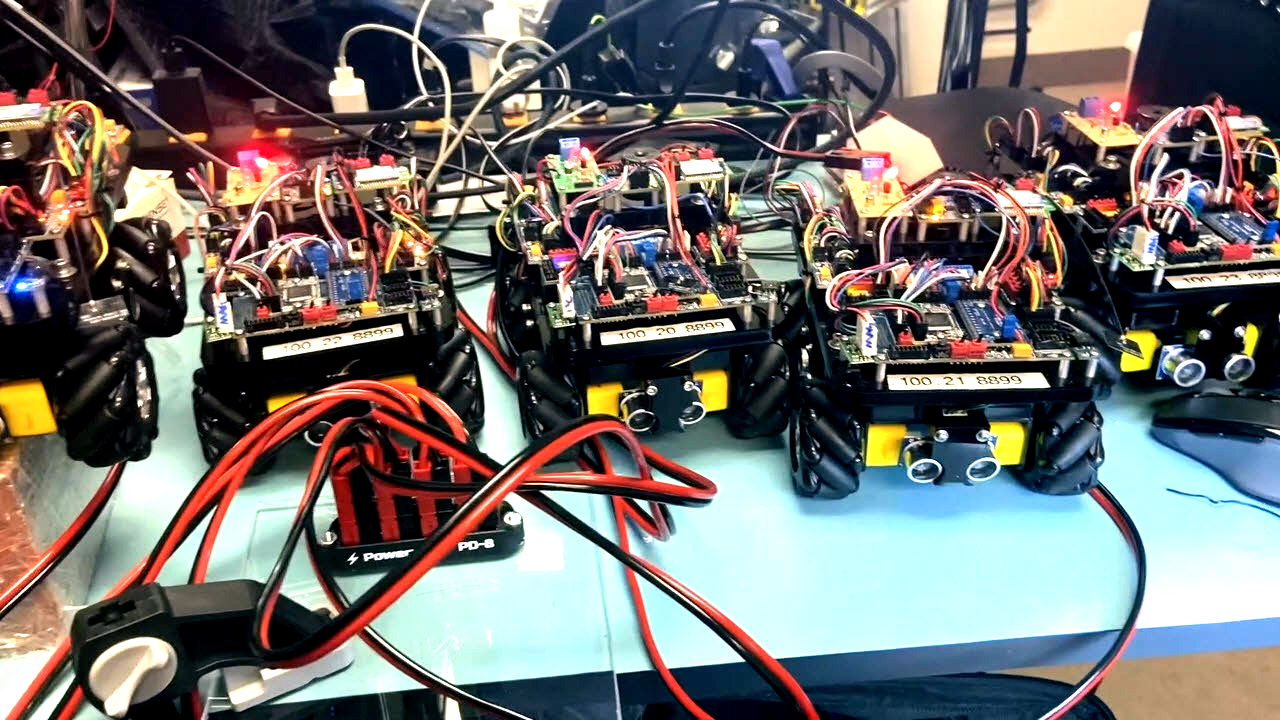
Microraptor® Rovers on Networked Robots Platform
|
MultipleMicroraptor® Rovers are Networked through the Networked Robots Platform. Each Microraptor® has a blue LED that blinks when it is part of the Networked Robots and can be controlled by Enterprise and Remote Entities. Also a quick overview of the Microraptor® Rover is presented.
|
|
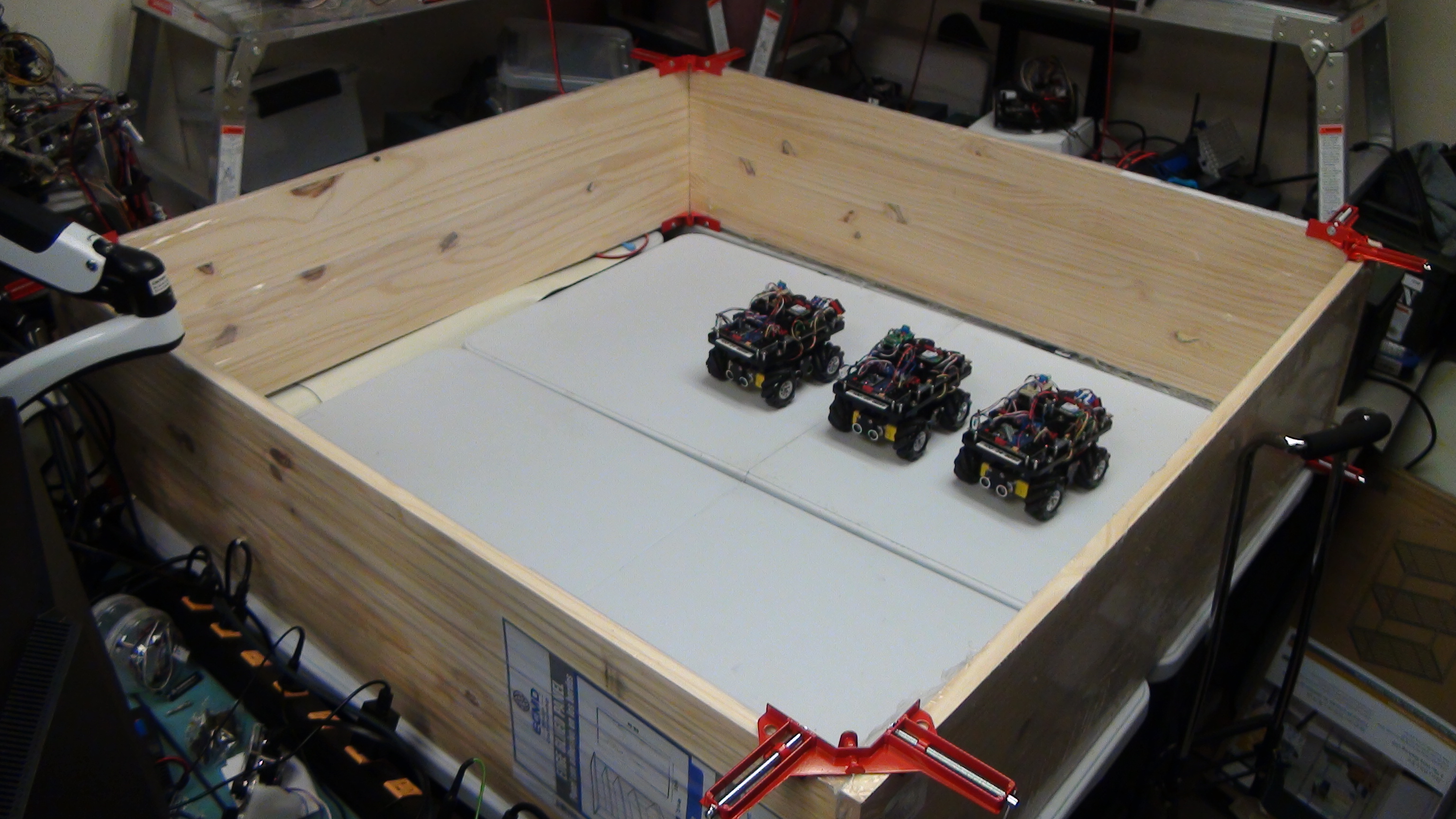
Java Application Simultaneous Control Three Networked Microraptors®
|
Through the Networked Robots System, three Microraptor® Rover Robots are simultaneously controlled by a single Java Application. The Java Application has a real-time two-way link to each Robot and simultaneously controls all three. Since the Java Application also has access to all sensors on all three Robots, very interesting applications can be developed. |
||
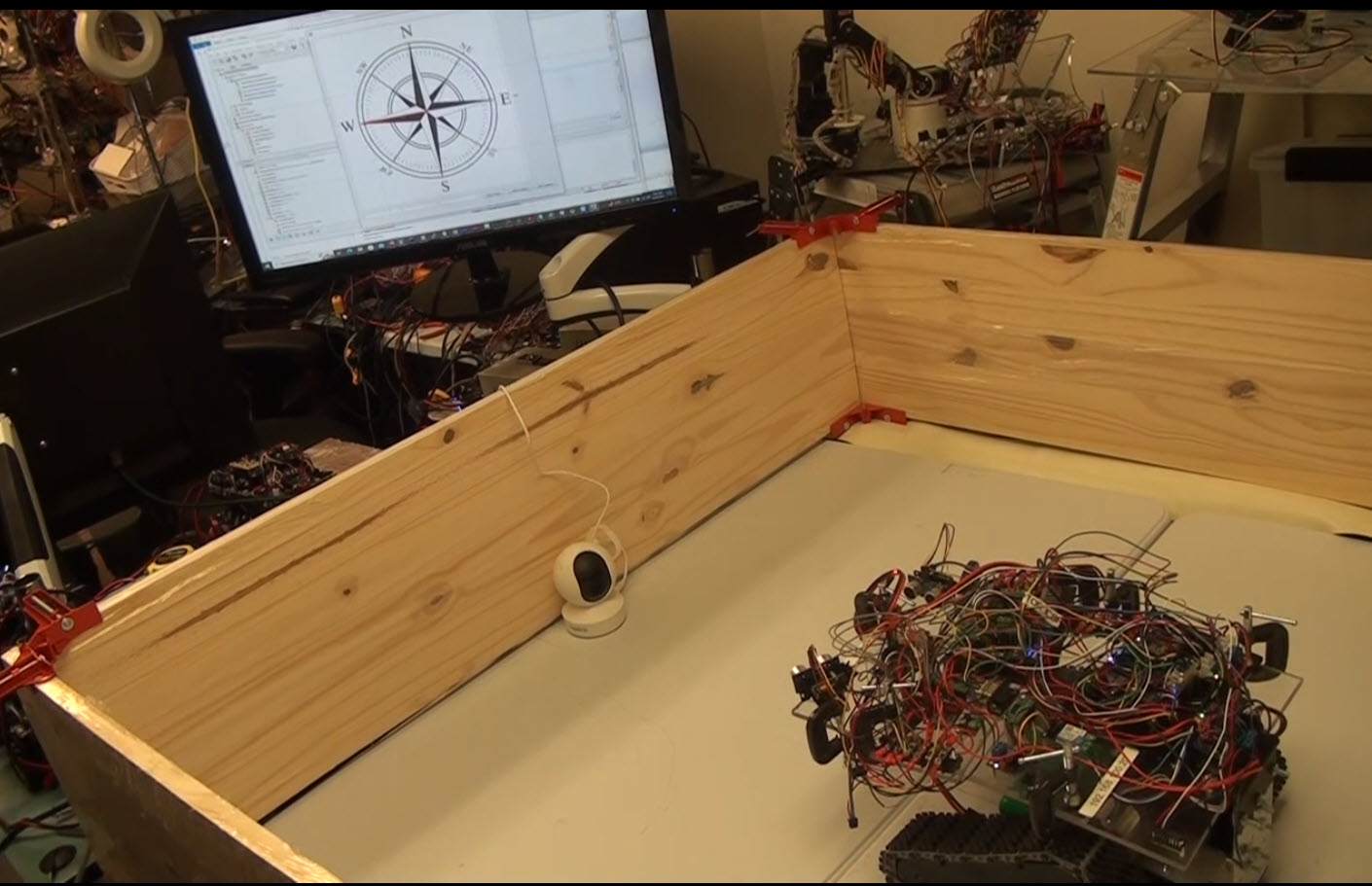
Tri-Track Tank Rover Magnetometer Compass Bean Networked Robots Tanking
|
Tri-Track Tank Rover on Networked Robots Platform with magnetometer showing measurement of orientation using Compass Java Bean (Developed by IONOTRONICS) while the Rover is Tanking. A Java Application is used to capture raw X,Y,Z data over the Networked Robot platform ( through the Internet). The calibrated orientation angle is computed and shown on the Compass Java Bean. Finally, the measured orientation is shown on the Compass Java Bean while the Tri-Track Tank Rover is tanking. For more details visit https://robotics.networkedrobots.com |
||
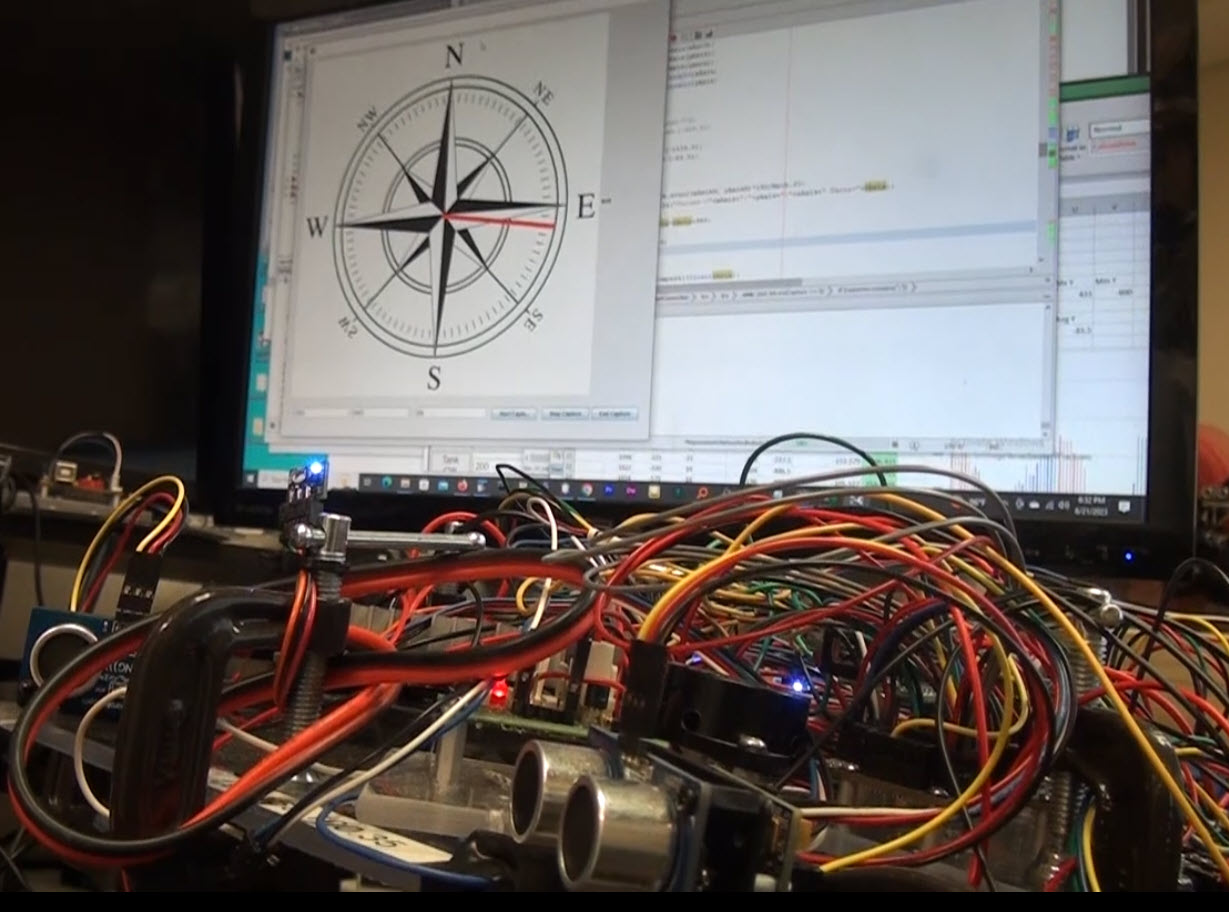
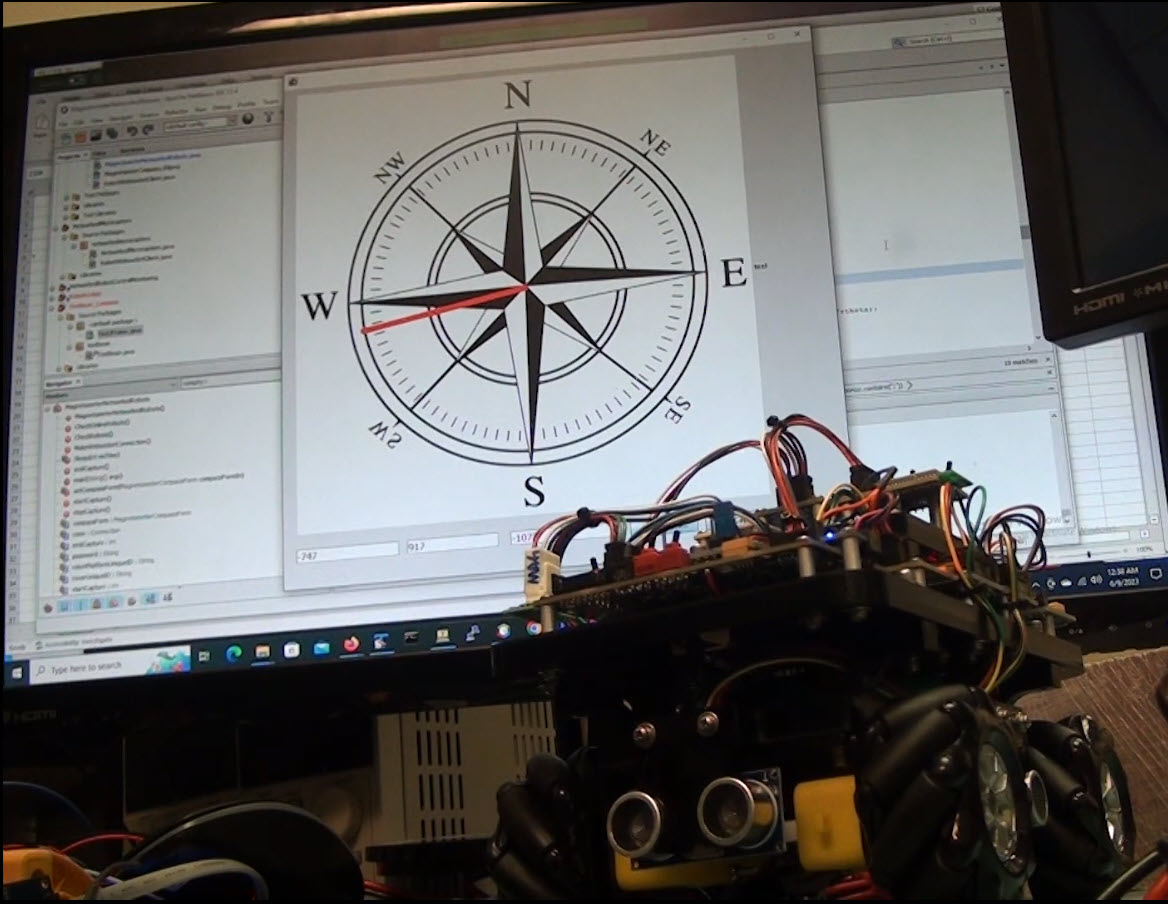
Tri-Track Tank Robot Rover Magnetometer Java Compass Bean Wireless Networked Robots Bench Test Calibration Data
|
Tri-Track Tank Rover on Networked Robots Platform with magnetometer showing measurement of orientation using Compass Java Bean (Developed by IONOTRONICS). Details on calibration of magnetometer data are provided. A Java Application is used to capture raw X,Y,Z data over the Networked Robot platform (actually through the Internet). Once the magnetometer calibration parameters are calculated, the calibrated orientation angle is computed and shown on the Compass Java Bean. Finally, the measured orientation is shown while the Tri-Track Tank Rover is tanking. |
||
Microraptor® Magnetometer Measurement Networked Robots Displaying Rotation All Orientations
|
A Microraptor® Rover Robot has a 3-Axis Magnetometer (ST Micro LIS3MDL). Using the Networked Robots System, a Java Application connects to the Microraptor® and on an interval basis measures the raw X,Y, an Z axis. The X and Y data is Calibrated and the orientation angle of the Microraptor® is calculated. A Java Bean (developed by IONOTRONICS®) is updated with the orientation. Note that the Compass Bean has a stationary image but the red needle indicates the orientation, The Java Bean can be adjusted so that East corresponds to the front of the Microrapto® etc. The Video also shows the Calibration approach. |