For white paper on Networked Robots click here.
See Networked Microraptors in Action ![]() and
and ![]() .
.
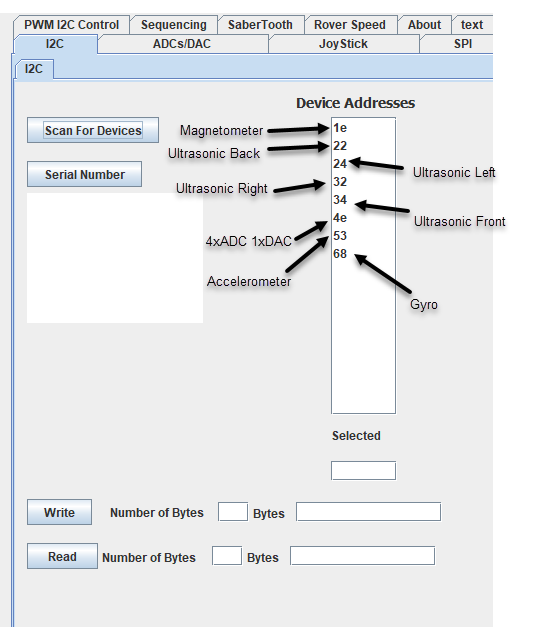
Check finding Microraptor Orientation from anywhere in the Internet using the Magnetometer and a Java Application ![]() .
.
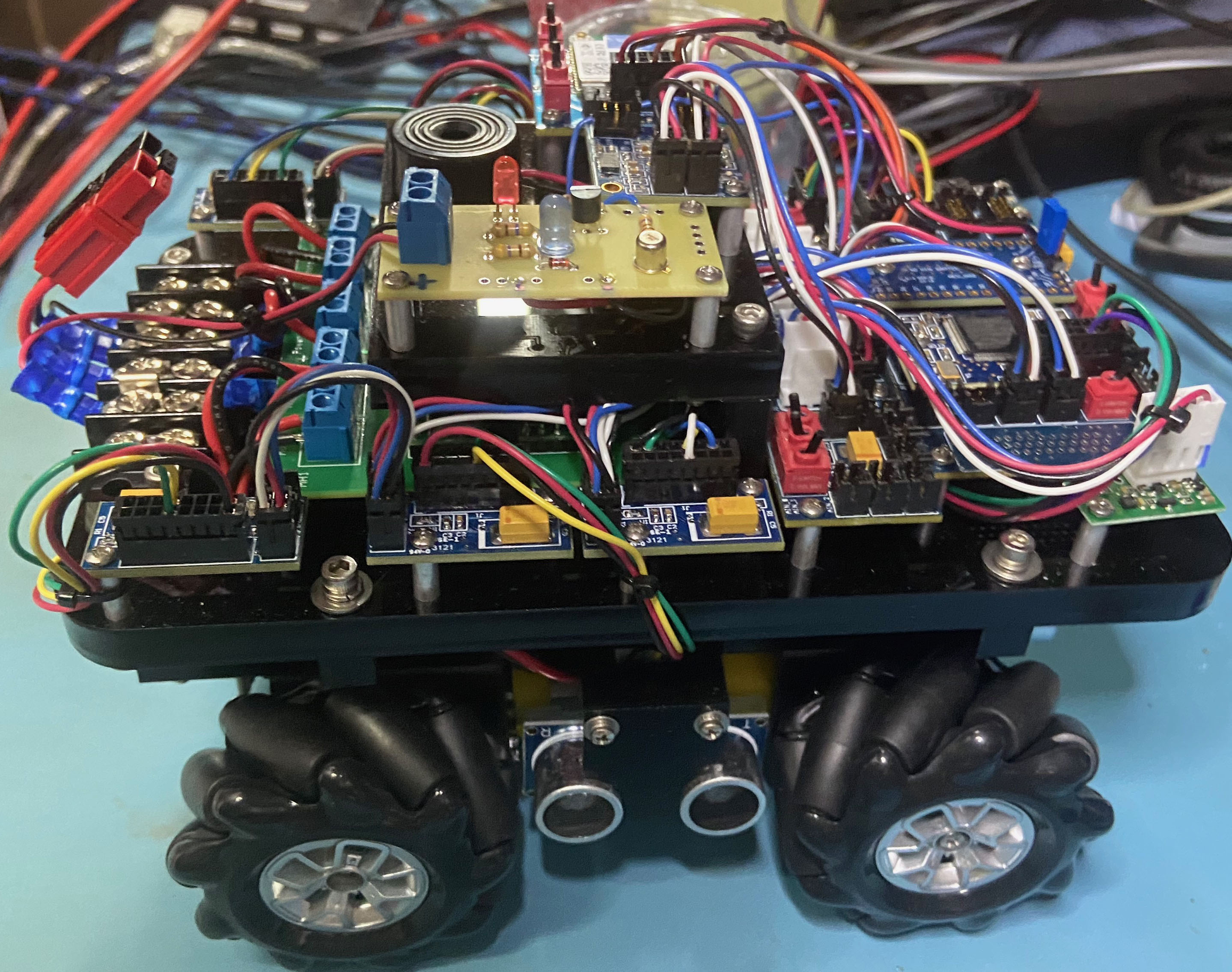
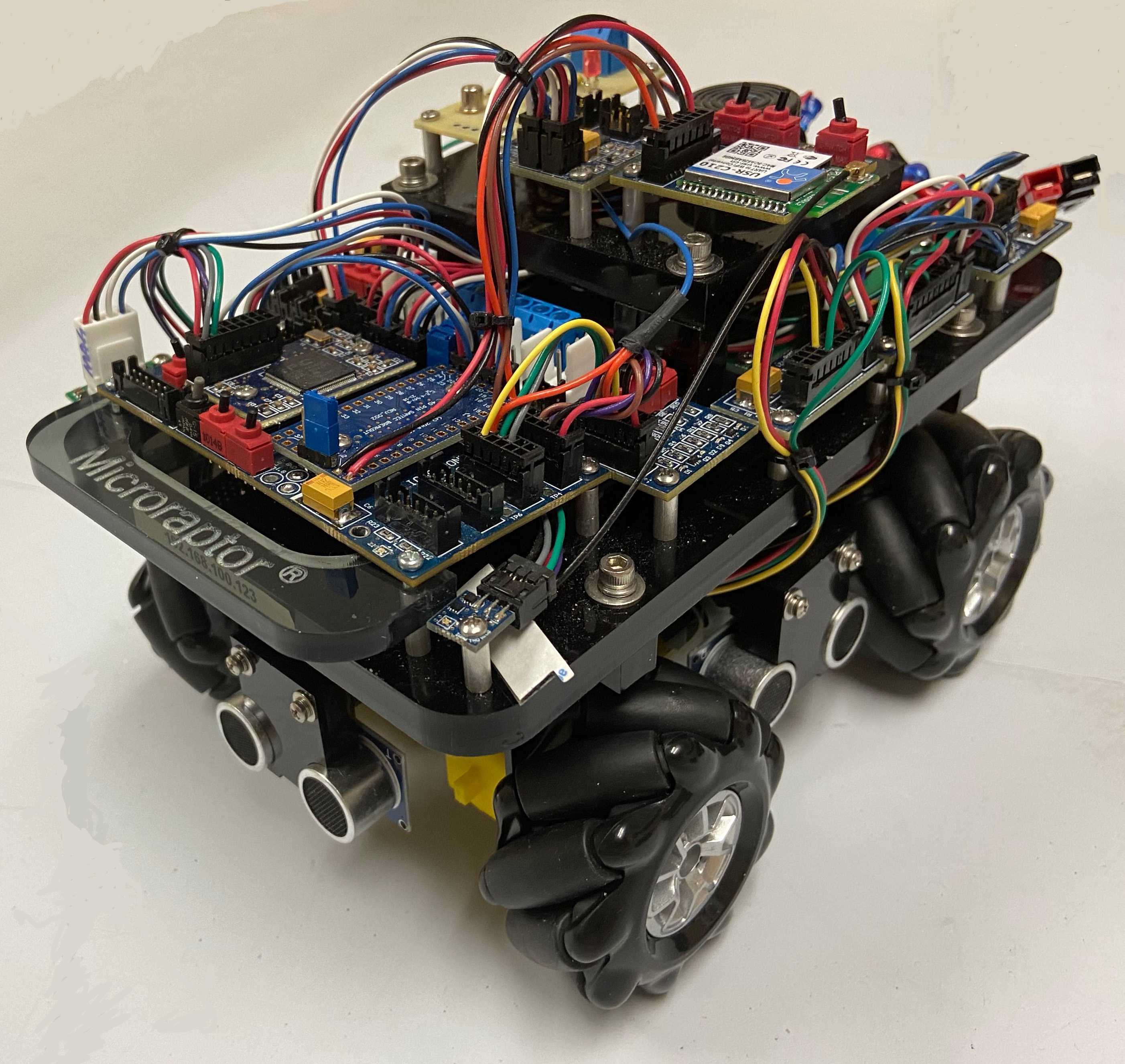
The Microraptor® Rover was developed to for the Networked Robots Platform. The Microraptor® Rover is Omnidirectional and has four Mecanum Wheels with four independent motors. For a great tutorial on Mecanum Wheels see ![]() . The Rover is packed with sensors that include a 3 Axis Accelerometer and Gyro, a 3D Magnetometer, four Ultrasonic sensors and a four channel ADC. The 4 Motors are interdependently controlled using PWM signals generated using two PIC16F1825 SoCs. Each supports two independent PWM signals.
. The Rover is packed with sensors that include a 3 Axis Accelerometer and Gyro, a 3D Magnetometer, four Ultrasonic sensors and a four channel ADC. The 4 Motors are interdependently controlled using PWM signals generated using two PIC16F1825 SoCs. Each supports two independent PWM signals.
Figure 1 shows an IONOTRONICS Microraptor®.
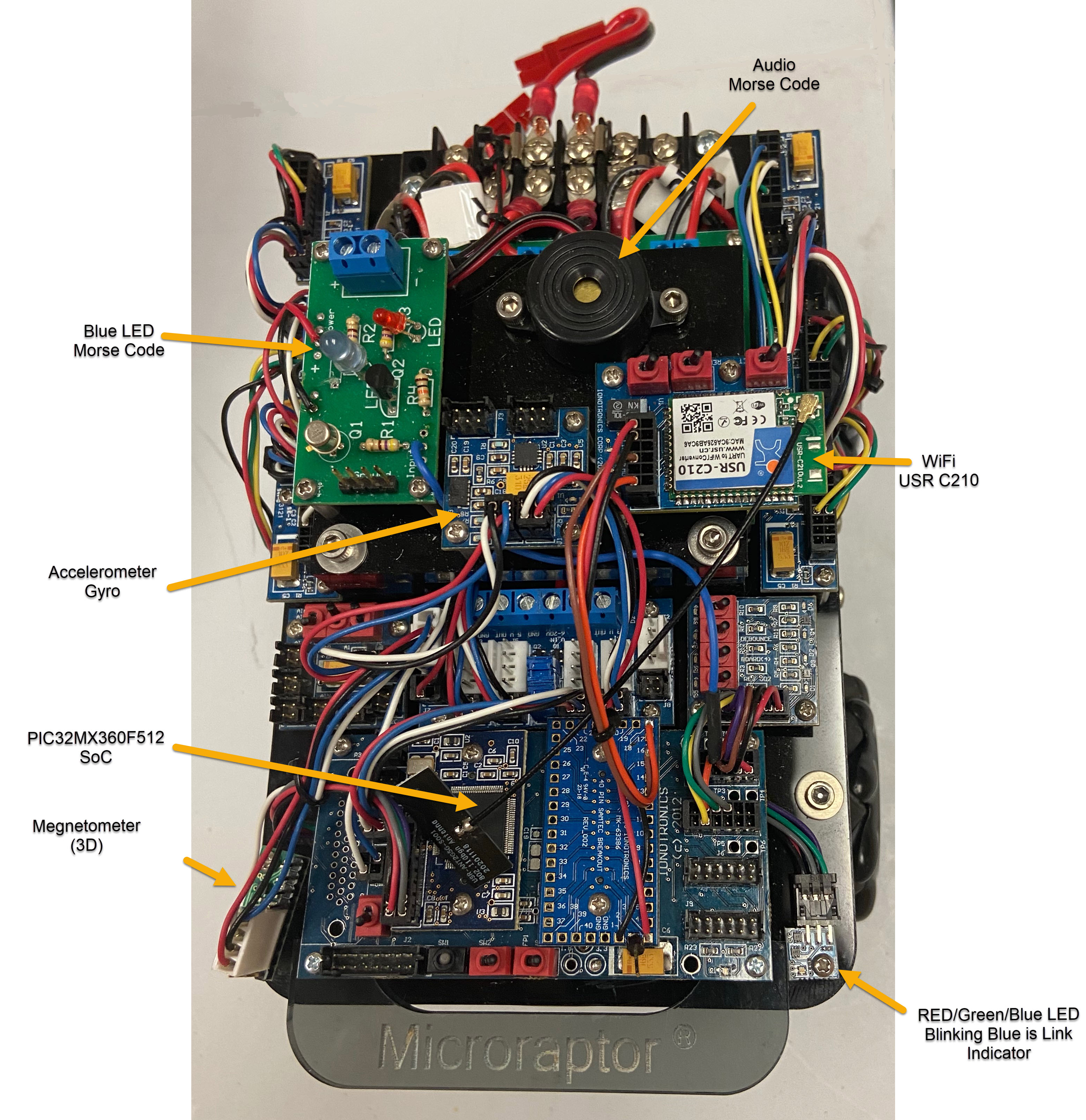
The architecture of the Microraptor® is shown in Figure 2. Note the key role that I2C plays for both sensors and motion control.

Note that the parts MK-34765, MK-24316, and MK-95157 as well as the support for the PIC32MX360F512 SoC are from IONOTRONICS.
For Software Development we use the Microchip MPLX IDE with PLIB. For integration into Networked Robots we have implemented the Remote Robotics Control Program (RRCP) that supports all Omnidirectional Movements possible with the four Mecanum Wheels. Code for fully autononomous operation has also been developed with collision avoidance by processing all four ultrasonic sensors. The Microraptor® Rover is a great platform for coding mobile robots.
The next generation Microraptor will use an ST Micro 32 bit ARM Cortex M4 based System on a Chip. The code has already been developed and a prototypeMicroraptor® with an ST Micro STM32 Evaluation board has been built and tested with full Omnidirectional Motion Support. See this link for a photo.
See ![]() and
and ![]() .
.